
| Objetivos |
Coordenação | Linhas de Pesquisa | Colaboradores | Projetos |
 |
 |
 |
 |
 |
Carlos Henrique Farias
dos Santos
Universidade Estadual do Oeste do Paraná
Campus de Foz do Iguaçu
Parque Tecnológico Itaipu
Av. Tancredo Neves, 6731 | Bloco 11 - Espaço 2 - Salas 4 e
5
Cep: 85856 - 970 | Foz do Iguaçu - PR - Brasil
Fone: +55 (45) 3576-7136
E-mail: chfdosantos@yahoo.com
Membros Externos:
 |
 Departamento de Automação e Sistemas Universidade Federal de Santa Catarina |
Coope-UFRJ
|
 Instituto Tecnológico de Aeronáutica |
 Universidade
Tecnológica Federal do
Paraná
|
 |
 VEÍCULO SUBAQUÁTICO AUTÔNOMO |
Estudo de um Sistema de Propulsão Tolerante a Falhas de Veículos Subaquáticos Autônomos aplicados à Inspeção de Barragens |
| O objetivo deste projeto é desenvolver a inspeção automatizada das instalações submersas de usinas hidrelétricas utilizando um veículo subaquático autônomo. Para tanto, propõe-se a utilização de tecnologias da engenharia mecânica e da engenharia de automação e controle. A sua estrutura consiste em uma sistematização que se inicia com uma ampla pesquisa bibliográfica e de entrevistas com engenheiros da Itaipu Binacional, como exemplo de validação. A partir das informações obtidas nestas pesquisas, serão desenvolvidas modelagens matemáticas e simulações computacionais que permitem investigar as características do ambiente fluido-dinâmico, considerando suas potencialidades e limitações. De posse destes resultados do volume de controle, implementa-se a modelagem analítica e simulação de um sistema de propulsão para o veículo autônomo ser capaz de realizar inspeções nas áreas submersas da usina em operação. Esta condição operativa implica na existência de uma inteligência embarcada, a qual permite que o veículo tome decisões quando se encontra em condições adversas, tais como: falha do sistema de propulsão ou diante de regiões de turbulência, como uma tomada d’água. | |
Instituições
Envolvidas:
Recursos: Fundação Araucária; Parque Tecnológico Itaipu Ciência e Tecnologia (PTI C&T). |
|
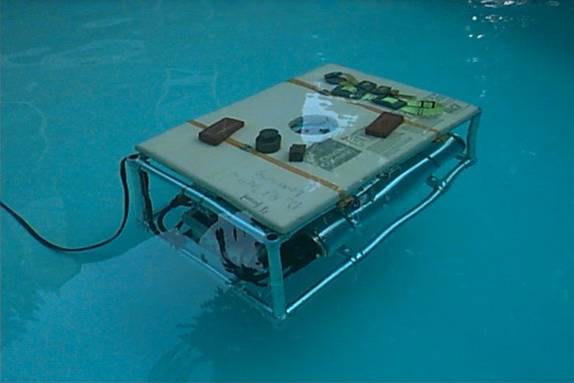 VEÍCULO
SUBAQUÁTICO DE OPERAÇÃO REMOTA
|
Inspeção
Automatizada
de Barragens Utilizando Um Sistema Robótico Subaquático
– Fase I
|
|
Este projeto de pesquisa
tem o
objetivo de desenvolver a inspeção automatizada das
instalações submersas de
usinas hidrelétricas utilizando um veículo
subaquático. Para tanto, nesta
primeria fase, propõe-se a utilização de
tecnologias da engenharia mecânica,
controle, visão de máquina e sistemas de
comunicação. Este projeto consiste em
uma sistematização que se inicia com uma ampla pesquisa
bibliográfica e de
campo. Sendo esta última, utilizando as
instalações de Itaipu Binacional como
exemplo de validação. A partir das
informações obtidas destas pesquisas,
desenvolvem-se simulações computacionais que permitem
investigar as
características do veículo subaquático e do
ambiente onde o mesmo atuará,
considerando suas potencialidades e limitações.
Adicionalmente propõe-se a
organização orçamentária para o futuro
desenvolvimento de um protótipo de
veículo operado remotamente para uma primeira análise
tecnológica e posterior
estudo para tornar este veículo autônomo a partir de fases
posteriores.
|
|
Instituições Envolvidas:
Recursos: Parque Tecnológico Itaipu Ciência e Tecnologia (PTI C&T). |
|
 |
Cooperação
Acadêmica e Científica em Sistemas de Controle Digital,
Automação e Robótica
(CoopAC-Automação)
|
|
Este projeto tem por objetivo a produção de pesquisas científicas e tecnológicas e formação de recursos humanos pós-graduados nas áreas temáticas de Automação e Controle e de Processamento e Tecnologia da Informação. Tendo em vista a experiência e a constituição das equipes envolvidas, e levando em conta a inserção destas no contexto científico e industrial de suas regiões e nacionalmente, as pesquisas serão desenvolvidas em Controle Digital, Automação e Robótica, e Sistemas Computacionais para Automação. |
|
Instituições Envolvidas:
Recursos: Coordenação de Aperfeiçoamento de Pessoal de Nivel Superior (CAPES). |
|